Factor Group
The factors defined in the factor group set up a relationship between ‘device internal’ unit and ‘user-defined’ units.
The ‘user-defined’ units are used in the corresponding objects representing position, velocity, and acceleration values.
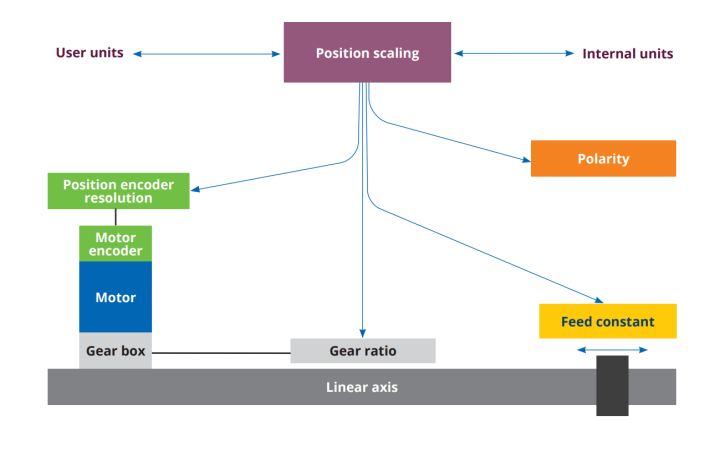
The ‘device internal’ units are always related to Motor_Resolution and are defined as:
‘Position Internal’ unit → Increments [ Inc ]
‘Velocity Internal’ unit → Increments/sec [ Inc/s ]
‘Acceleration Internal’ unit → Increments/sec2 [ Inc/s2 ]
The factor group is only available with firmware V00R80 or superior.
If you have firmware V00r79 or lower, only the ‘device internal’ units are considered.
The unit conversions for position, velocity and acceleration values are done by the following formulas:






-
-
-
(1) The ‘device internal’ unit for position is defined in Increments.
-
The motor resolution used for position conversion is 65536 Inc/rev (Motor_Parameters (Motor_Step_Angle) (2012.1H), Motor_Parameters (Motor_Pole_Pairs) (2012.2H), Motor_Resolution (60EF.0H) objects are not considered for conversion).
-
(2) The ‘device internal’ unit for velocity is defined in Increments/sec.
-
The motor resolution used for velocity conversion is defined by the (Motor_Parameters (Motor_Step_Angle) (2012.1H), Motor_Parameters (Motor_Pole_Pairs) (2012.2H), Motor_Resolution (60EF.0H) objects.
-
(3)The ‘device internal’ unit for acceleration is defined in Increments/sec2.
-
The motor resolution used for acceleration conversion is defined by the (Motor_Parameters (Motor_Step_Angle) (2012.1H), Motor_Parameters (Motor_Pole_Pairs) (2012.2H), Motor_Resolution (60EF.0H) objects.
-
-
If Sensor_selection_code (606A.0H) object is equal to 0 or -2, the encoder resolution must be defined Position Encoder Resolution (Encoder Increments) (608F.1H) and Position Encoder Resolution (Motor Revolution) (608F.2H).
-
If Sensor_selection_code (606A.0H) object is equal to -3, the BiSS encoder configuration must also be defined (BiSS_Encoder_Config (2A04.0H). The encoder resolution is always normalized to 65536 Inc/rev and configuration parameters defined using Position Encoder Resolution (Encoder Increments) (608F.1H) and Position Encoder Resolution (Motor Revolution) (608F.2H) objects are overridden.
-
If ‘Sensor_selection_code’ (606A.0H) object is equal to -1 and Closed Loop is enabled then encoder resolution must be defined. If the sensor type is an incremental encoder, the encoder resolution is defined by the Position Encoder Resolution (Encoder Increments)(608F.1H) and Position Encoder Resolution (Motor Revolution) (608F.2H) objects. If sensor type is an absolute BiSS encoder, the encoder resolution is always normalized to 65536 Inc/rev (Position Encoder Resolution (Encoder Increments) (608F.1H) and Position Encoder Resolution (Motor Revolution) (608F.2H) objects are disregarded) and the BiSS encoder configuration must be defined (BiSS_Encoder_Config, 2A04.0H).
-
The factor group is not used to convert ‘Velocity Mode’ objects (Velocity Mode (vl)). In ‘Velocity Mode’, the ‘Velocity internal unit’ is rpm (revolutions/min) and ‘vl dimension factor’ objects are used for conversion.
Related objects
| Index | Object | Name | Type | Attr. | M/O |
|---|---|---|---|---|---|
|
2012H |
RECORD |
rw |
M |
||
|
2013H |
RECORD |
UNSIGNED32 |
rw |
O |
|
|
608FH |
ARRAY |
UNSIGNED32 |
rw |
O |
|
|
6091H |
ARRAY |
UNSIGNED32 |
rw |
O |
|
|
6092H |
ARRAY |
UNSIGNED32 |
rw |
O |
|
|
60EF.0H |
VAR |
Motor_Resolution (1) |
UNSIGNED32 |
ro |
O |
-
- (1) Available with firmware V00R80 or superior.






